Way to innovate rough terrain movement
Simultaneously plan route to destination and modified terrain
Contributing to backhoe automation for safe construction
Overview
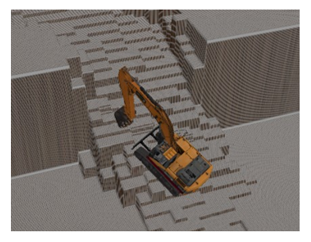
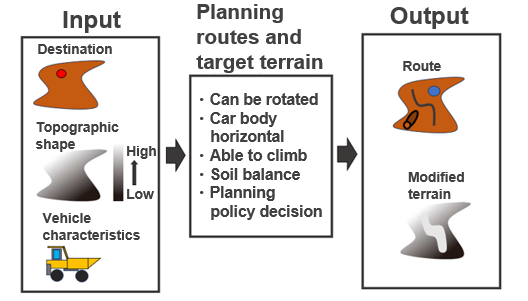
Since the transportation network of goods is cut off when the road is cut off by the landslide disaster, it is indispensable to secure the passage of vehicles by improving the temporary road in the disaster site for quick recovery. The temporary road is constructed by the excavation operation of the backhoe, but the operation is accompanied by the risk of the secondary damage, so the automation technology of the backhoe is required. In the conventional research, the motion planning to change the level difference to the roadable slope was carried out, and the modification work using the simulator was successful. However, to move to the destination in the remote place, the route to the destination and the excavation work must be planned simultaneously, and the simultaneous planning has not been achieved. This invention proposes a method to simultaneously carry out the excavation planning of the rough ground and the route planning to the destination. The excavation is realized by fitting the roadable slope in the footprint of each point on the route, and adjusting the amount of cut soil and embankment of the slope to be equal. By adding the cost of excavation and movement to the planning problem by the A* method, and deriving the solution to minimize the cost, the modified terrain and the moving route are calculated simultaneously. It is also possible to flexibly adjust the guide of the route and the excavation plan by changing the weighting of each cost.
Features・Outstandings
Product Application
・Design of temporary roads during disasters and construction
Related Works
[1] Yuta Suzuki, Yoshitaka Kurosaki, Kazunori Ono, Shotaro Kojima, Ranulfo Bezerra and Satoshi Tadokoro, “Route planning of backhoe moving by modifying difficult terrain ”, Lecture Meeting on Robotics and Mechatronics 2024, Japan Society of Mechanical Engineers
[2] Yuta Suzuki, Yoshitaka Kurosaki, Kazunori Ono, Shotaro Kojima, Ranulfo Bezerra, Tomoaki Satomi, Hiroshi Takahashi and Satoshi Tadokoro, “Route with Slope for Backhoe to Modify Difficult Terrain and Terrain Planning ”, The 42nd annual conference of the Robotics Society of Japan 2024, The Robotics Society of Japan.
IP Data
IP No. : JP2024-085858
Inventor : ONO Kazunori, KOJIMA Shotaro, SUZUKI Yuta, KUROSAKI Yoshitaka, PLUTARCO BEZERRA NETO RANULFO
keyword : backhoe, Construction DX